
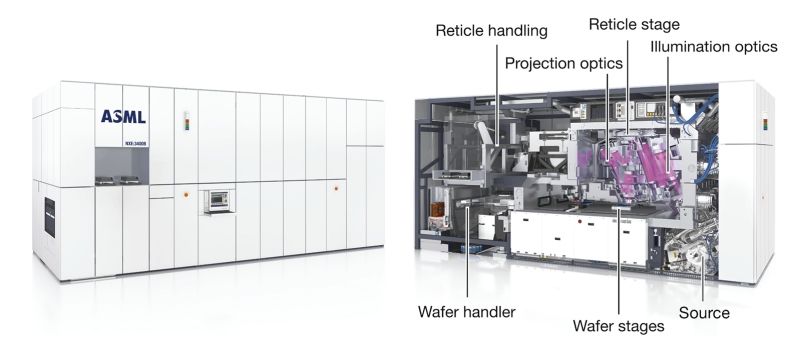
EUV 스캐너는 기본적으로 DUV 스캐너 시스템과 동일합니다. 그러나 마스크와 웨이퍼, 센서 시스템 및 스테이지와 같은 기존 모듈은 진공과 호환되도록 만들어야 하죠.
EUV 광학계
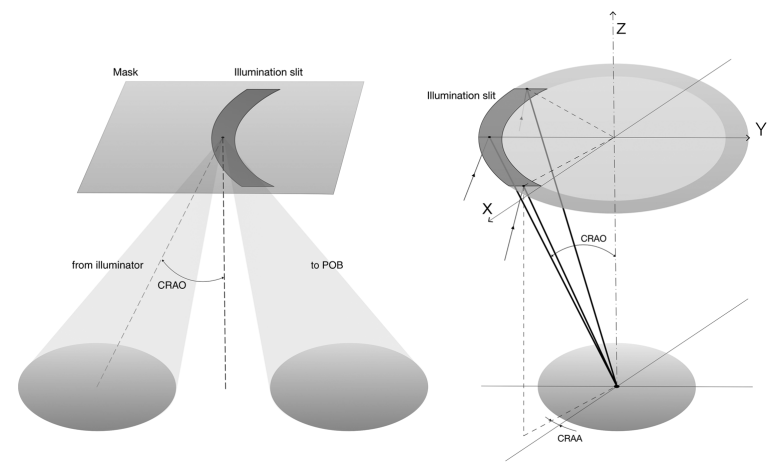
시스템에서 주요한 광학적 구성 요소는 광원 조명 시스템과 프로젝션 시스템입니다. 광원은 EUV 툴의 필수적인 부분이며, EUV 노광 툴의 마스크는 반사형이므로 마스크의 조명은 비중심적이죠. 입사각은 CRAO라고 합니다. 우측 그림을 통해 알 수 있듯, 주 광선 각도가 조명 필드 내 위치에 따라 달라진다는 것을 보여줍니다. 마스크의 입사각은 마스크 3D 효과에 큰 영향을 미칩니다. 마스크 3D 효과를 완전히 이해하려면 마스크의 모든 입사 각도를 알아야 합니다. 이 효과를 보정하려면 이 입사각을 알아야 합니다. 즉, 조명 모드뿐만 아니라 필드 위치의 함수인 CRAA뿐만 아니라 CRAO도 알아함을 잊지 맙시다.
EUV 광원
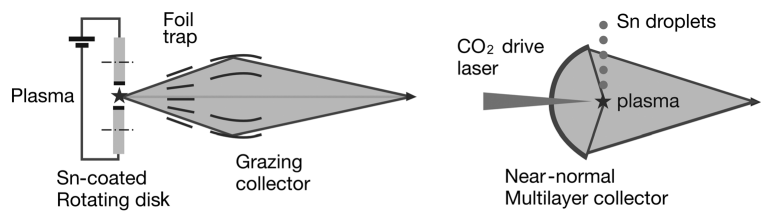
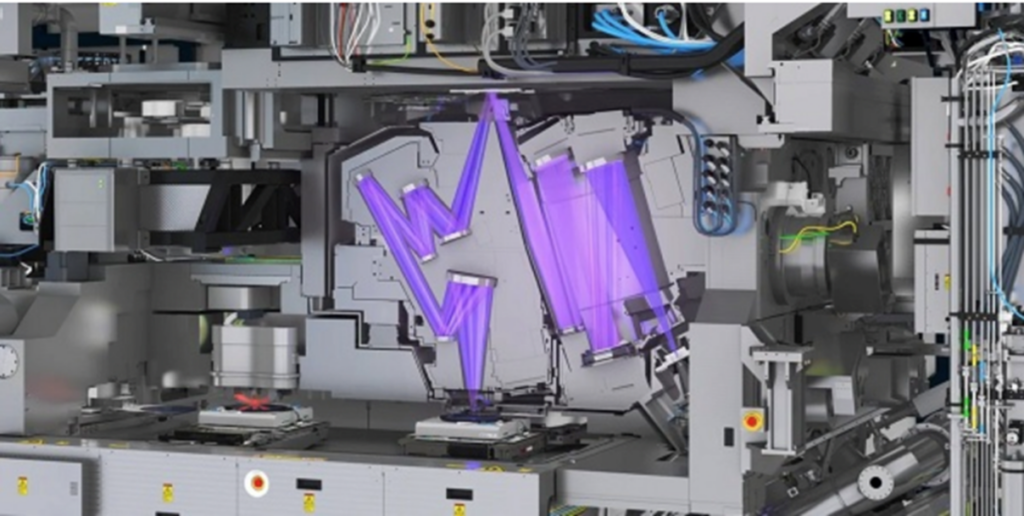
광원은 EUV 리소그래피의 가장 큰 과제죠, 13.5nm EUV 광을 생성할 수 있는 플라즈마를 생성하기 위해 두 가지 Sn 기반 기술이 연구되었습니다. DPP 시스템에서 플라즈마는 펄스 고전류 방전으로 형성됩니다. 플라즈마에서 방출되는 EUV 광은 그레이징 콜렉터에 의해 조명기로 향합니다. 플라즈마에서 나오는 Sn 입자를 수집하기 위해 포일 트랩이 있는게 특징이죠.
LPP 시스템에서는 고출력 펄스 적외선 레이저가 Sn 방울에 집중되어 플라즈마를 생성합니다. 플라즈마에 의해 생성된 빛은 타원형 거울로 수집되어 IF라고 하는 조명기의 입구 평면에 집중됩니다. 초기 EUV 툴(NXE:3100 같은 설비)에는 DPP 소스가 장착되었습니다만... 오늘날 툴의 경우 LPP 소스가 대세죠.
EUV 일루미네이터(조명)
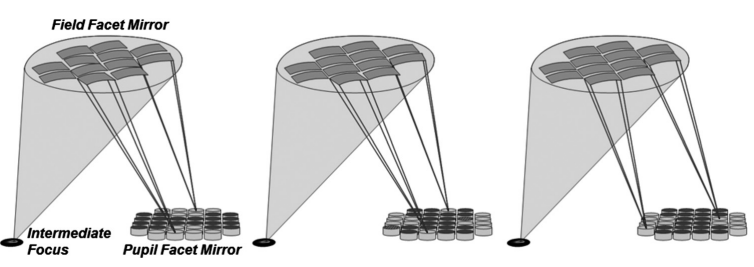
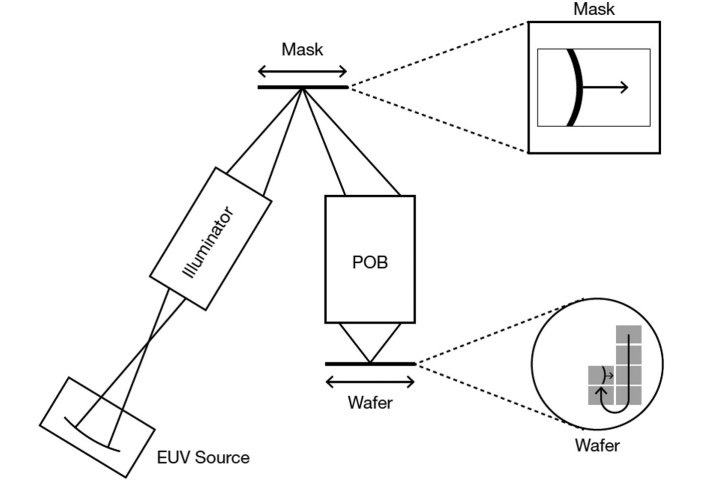
일루미네이터 시스템은 광원의 빛을 마스크에 투사하는 역활입니다. 마스크의 패턴에서 굴절된 광은 POB에 의해 캡처되어 웨이퍼 레벨에서 마스크 패턴의 Aerial 이미지를 생성하죠. 이 시스템의 존재 목적은 균일한 광 강도 프로파일로 마스크를 비추는 것입니다. 이 외에도 이미지를 최적화하기 위해 시스템은 빛의 다양한 각도 분포(퍼필 모양)에도 적용 가능해야하죠. 설계의 핵심 요소는 field facet module과 pupil facet mirror입니다.
pupil facet은 individual field facets을 마스크 위에 겹쳐서 이미지화합니다. pupil facet은 마스크 레벨에서 field facets의 이미지가 가능한 한 겹치도록 개별적으로 기울어집니다. 그래서 마스크 레벨의 강도 프로파일은 일루미네이터의 individual field facets의 합으로 정의되죠. 이렇게 하면 field facets에서 소스의 원거리 필드 균일도와 비교할 때 마스크 레벨의 균일도가 크게 향상됩니다. 각 field facet mirror는 하나 이상의 pupil facet mirror와 연결되며, 전환도 됩니다. 이렇게 하면 광학 효율성을 잃지 않으면서 다양한 조건의 모드를 지원할 수 있습니다.
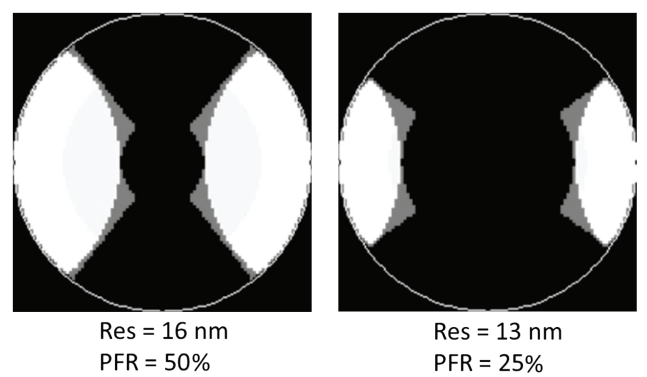
일루미네이터의 광학 설계는 위 그림에 표시된 기하학적 모양에 국한되지 않고 다른 복잡한 모양을 만들 수 있으며, 이는 소위 소스 마스크 최적화(SMO)를 지원하는 데 특히 유용하죠. 결과적으로 오버레이 및 노출 위도와 같은 이미징 파라미터에 대한 시스템 성능을 최적화하는 데 사용할 수 있습니다. 설계에 관련된 설계 파라미터는 SMO 범위와 PFR입니다. SMO을 극대화하려면 지원되는 SMO 범위가 전체 퍼필을 커버해야 합니다. PFR은 Aerial 이미지의 콘트라스트를 최적화하는 데 사용되는 파라미터입니다.
해상도 한계에 가까운 이미징은 일반적으로 다이폴 일루미네이터로 진행되는데, 이때 얻어지는 이미지는 1차 및 0차 차수의 간섭에 의해 형성됩니다. 위 그림과 같이 1 차수와 0 차수가 완전히 겹칠 때 대비 및 DOF 측면에서 최적의 이미징 결과를 얻을 수 있습니다. 이 그림은 해상도가 증가함에 따라 조명 소스의 크기와 따라서 PFR이 감소해야 함을 보여줍니다. 이 특정 경우(대충 0.33 NA 시스템에서...)에서는 최대 25%의 PFR에서 최적의 콘트라스트값을 달성하죠. 균일성에 대한 니즈도 있는데, 이를 위해 Unicom이라고 하는 보정 모듈이 조명 시스템에 추가되기도 합니다.
EUV 프로젝션
프로젝션 시스템에서 가장 중요한 설계 파라미터는 NA와 Wavefront error(WFE)입니다. 수차는 그 영향에 따라 다음과 같이 나눠지는데,
1. Total WFE는 Aerial 이미지를 저하시키고 콘트라스트 손실을 일으킴.
2. 홀수차 수차는 패턴 이동(오버레이)과 이미징 비대칭(왼쪽/오른쪽 차이)을 일으킴.
3. 짝수차 수차는 초점 성능에 영향을 미침.
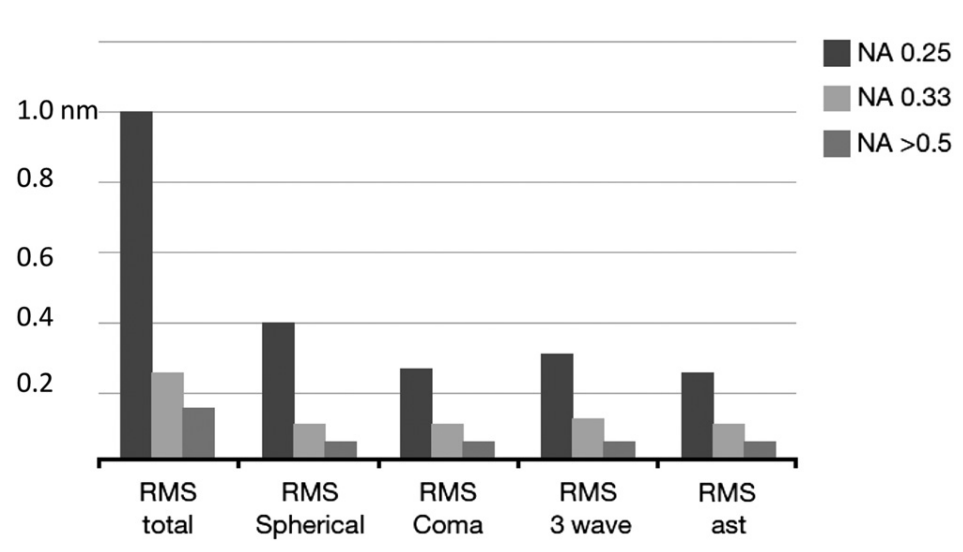
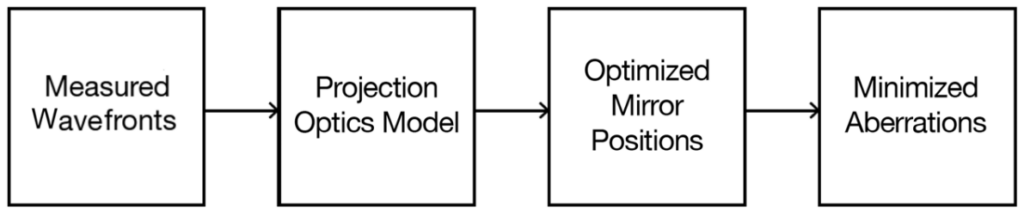
1세대 EUV 시스템은 RMS 값이 1nm 미만인 것이 특징이었지만, 현재 시스템은 0.3nm 미만의 RMS 값을 가지고 있습니다. High-NA 시스템의 경우에는 약 0.15nm가 되어야 합니다. 이를 위해 시스템에는 웨이퍼 스테이지에 인라인 WF 센서가 통합되어 있습니다. 이 센서로 개별 제르니케(Zernike) 다항식을 0.1nm 이상의 정확도로 측정할 수 있습니다. WF 센서 데이터와 레지스트 측정 데이터를 결합하여 이미징 및 오버레이 성능을 위해 시스템을 최적화할 수 있습니다. 측정된 WF은 POB에서 미러의 위치를 조정하여 최적화됩니다.
웨이퍼가 노출되면 '모든 미러에서 EUV 광의 40%가 흡수됩니다. 이로 인해 미러의 전체 및 국부적 부위에서 가열이 발생하여 수차, 오버레이 및 초점이 변경될 수 있습니다. 패시브 냉각 시스템을 통해 POB의 평균 온도를 일정하게 유지하고. 열팽창 계수가 매우 낮은 미러 소재를 사용하여 온도 영향을 최소화 시키려하죠.
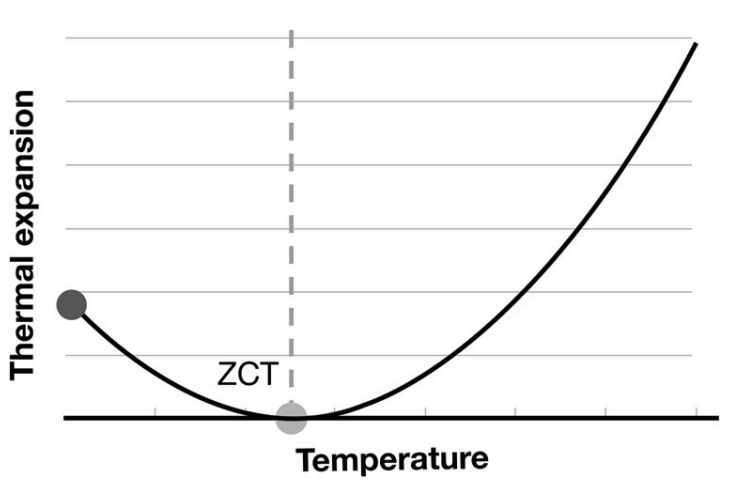
미러 소재의 열팽창 계수는 위 그림에 표시된 것처럼 온도에 따라 달라지는것은 다들 알고 계실 것입니다. 물질의 열팽창 계수는 특정 온도, 즉 제로 교차 온도(ZCT)에서 0이 됩니다. 그로인해 ZCT 주변에서 작동하는 미러는 최소한의 온도 변형을 보입니다. 미러 가열로 인해 발생된 효과는 스캐너 계측으로 모니터링하고 미러 위치를 조정하여 보정됩니다. POB 가열의 시간은 웨이퍼 노출 시간에 비해 길기 때문에 단일 광량 노출 중에 보정이 필요하지 않습니다. 그리고 장기 수차 드리프트는 인라인 WF 센서로 측정하여 미러 위치로 피드백시켜 다시 보정케하는 매커니즘을 가지고 있죠.
EUV 설비(메카트로닉)
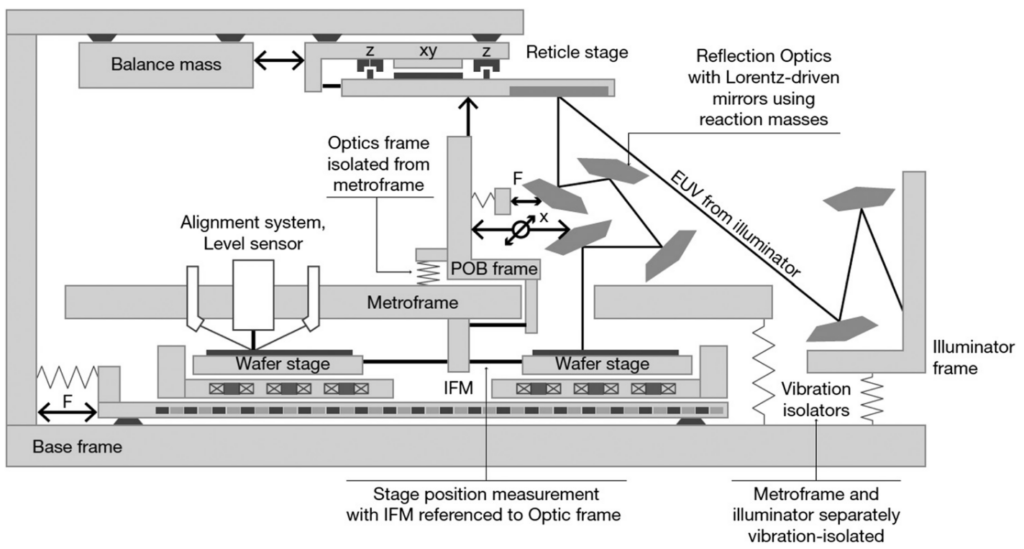
시스템에서 프로젝션 광학의 미러는 일반적으로 actuators와 고해상도 엔코더 센서를 사용하여 위치를 제어합니다. 엔코더는 변형이 위치 오류로 이어질 수 있으므로 동적으로 안정적이어야 하는 계측 프레임에 장착됩니다. 또한 POB 프레임의 고주파 움직임은 미러 제어 루프에서 정확하게 추적할 수 없습니다. 이러한 이유로 계측 프레임은 바닥 움직임과 스테이지 반항력에 의해 방해를 받는 지지 베이스 프레임과 동적으로 분리되어야 합니다.
광학 구조에 대한 다른 요구 사항으로는 미러의 반응 경로와 미러 반응력을 흡수하는 POB 프레임을 통해 전파되는 미러 reaction forces가 있습니다. EUV 시스템은 진공 상태에서 작동하기 때문에 스테이지에 에어 베어링을 사용할 수 없습니다. 따라서 magnetically levitating long-stroke 무버는 6도 freedom short-stroke actuators와 flexuresuspended balance masses와 결합할 수 있습니다. 그리고 LIF와 같은 간섭계 시스템은 프로젝션 광학에 대한 스테이지의 위치 측정에 사용됩니다. 간섭계 기반 측정 시스템은 진공 상태에서 작동하기 때문에 대기(대류)의 방해가 없기 때문이죠.
EUV 스테이지(웨이퍼&마스크)
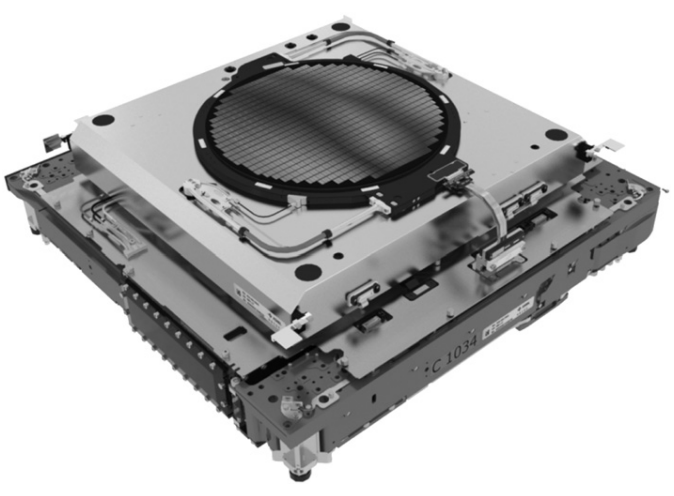
기존 웨이퍼 및 마스크 스테이지 기술을 진공 환경에 맞게 조정해야 하겠죠?. EUV 시스템의 경우 정전기력을 기반으로 하는 클램프를 사용합니다. 스테이지에 사용되는 에어 베어링은 스테이지가 높은 스캔 속도와 가속도로 움직일 수 있는 자석판으로 대체되었죠. EUV 웨이퍼 스테이지는 위 그림처럼 되어있죠.
최초의 풀필드 EUVL 시스템은 단일 스테이지 시스템으로, EUV 리소그래피의 성능을 입증하기 위한 것이었기 때문에 처리량은 주요 성능 파라미터가 아니었습니다. 하지만 현 시대는 다르죠, 대량 생산 시스템의 경우 처리량이 중요해지고 있습니다. 듀얼 스테이지 개념은 metrology overhead를 크게 줄여줍니다. 스테이지의 설계는 오버레이 및 이미징에 매우 중요합니다. 생산성을 위해 스테이지가 높은 가속성을 지원해야 필드 간 step overhead시간을 최소화할 수 있습니다.
결과적으로 웨이퍼 스테이지가 약 0.3m/s 이상 속도로 움직이죠. 마냥 빠르기만 해서는 안되죠, 정확성 또한 중요한 부분입니다. 스테이지가 single machine and on-product overlay 요구 사항을 지원해야 하고, 빈번한 위치 변화가 Aerial 이미지의 콘트라스트에 영향을 미치기 때문에 high-frequency position accuracy와 low-frequency position error 파라미터도 고려야해야합니다.
EUV 오염
다층 미러는 오염에 매우 민감하며, 특히 EUV 광과 결합할 경우 더욱 그렇습니다. 오염은 미러의 반사율과 수명을 감소시킵니다. 광학 장치의 수명을 늘리기 위한 클리닝 조건은 까다롭기까지 하죠. H2가 주로 사용되는데 효과적인 세척을 위해서는 3~5 Pa 범위의 분압이 필요합니다.
EUV 계측
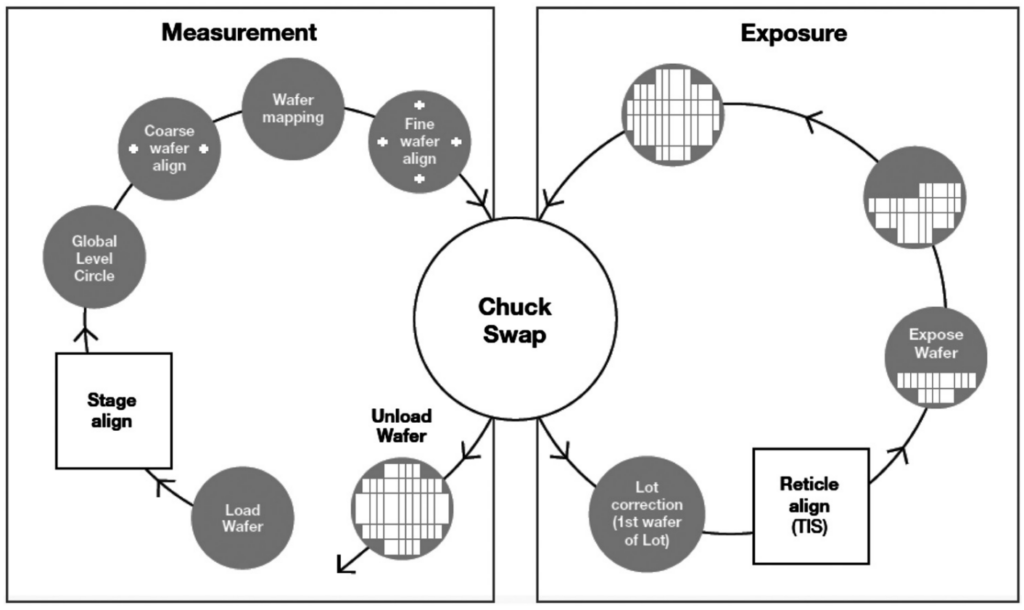
EUV 스캐너의 계측은 원칙적으로 ArF(i) 시스템에 사용되는 계측과 동일합니다만 EUV의 경우. Wavefront 계측과 웨이퍼를 마스크에 정렬하는 데 필요한 센서는 진공 상태에서 작동해야 합니다. E그러나 전체적인 시퀀스는 거의 유사(비슷, 동일)하죠. 예를 들어 '웨이퍼 측정' 계측 단계는 척킹된 웨이퍼의 최적 레벨링하고, ArF(i) 툴에서와 마찬가지로 먼저 웨이퍼가 웨이퍼 스테이지에 정렬됩니다. 그런 다음 포지셔닝 시스템과 초점 센서 시스템을 사용하여 전체 웨이퍼의 토폴로지를 측정합니다. 그 다음 웨이퍼 스테이지가 레티클 및 레티클 스테이지에 정렬되는데, 측정 및 노출 위치에 대한 정보를 결합하여 웨이퍼가 수평면에서 레티클에 정확히 정렬됩니다. 전체 시퀀스는 소프트웨어 제어하에 완전히 자동화됩니다.
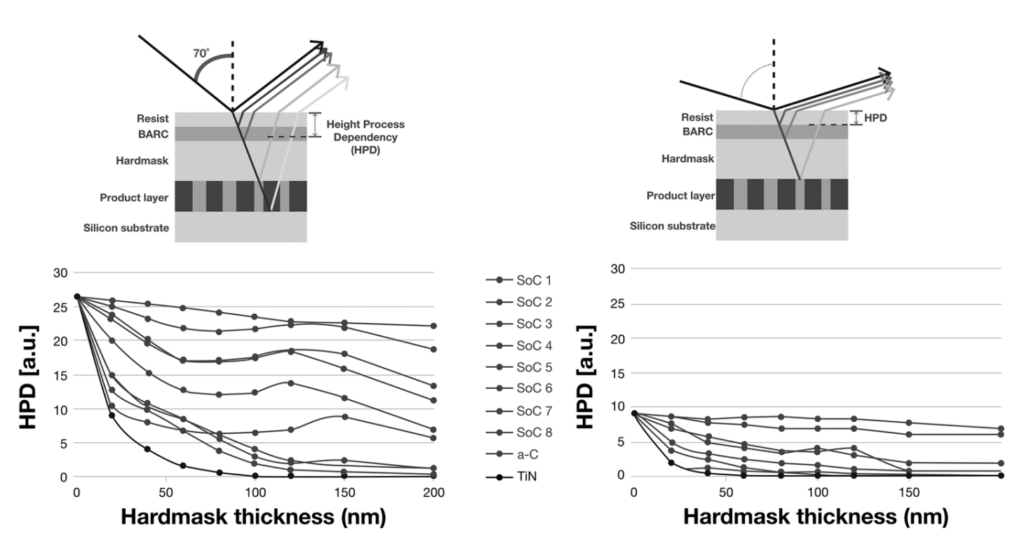
웨이퍼의 토폴로지는 광학 삼각 측량 원리에 따라 측정됩니다. 센서 일루미네이터에 들어오는 빛은 웨이퍼 표면에 의해 반사되고, 높이는 반사된 빔의 변위로 측정됩니다. 들어오는 빔은 상단 표면뿐만 아니라 기본 레이어 스택에도 반사됩니다. 소위 공정 종속 효과로 인해 측정된 웨이퍼 높이에서 오차가 발생할 수 있습니다. 센서의 공정 의존성은 빛의 입사각을 최적화하거나 빛의 스펙트럼을 최적화하여 줄일 수 있습니다.
(여기 부분은 저도 잘 모릅니다. 대충 주워듣고 하는 그런지식이니 참고만.. 하시기 바랍니다. 스테이지 전문가 나와주세요!)
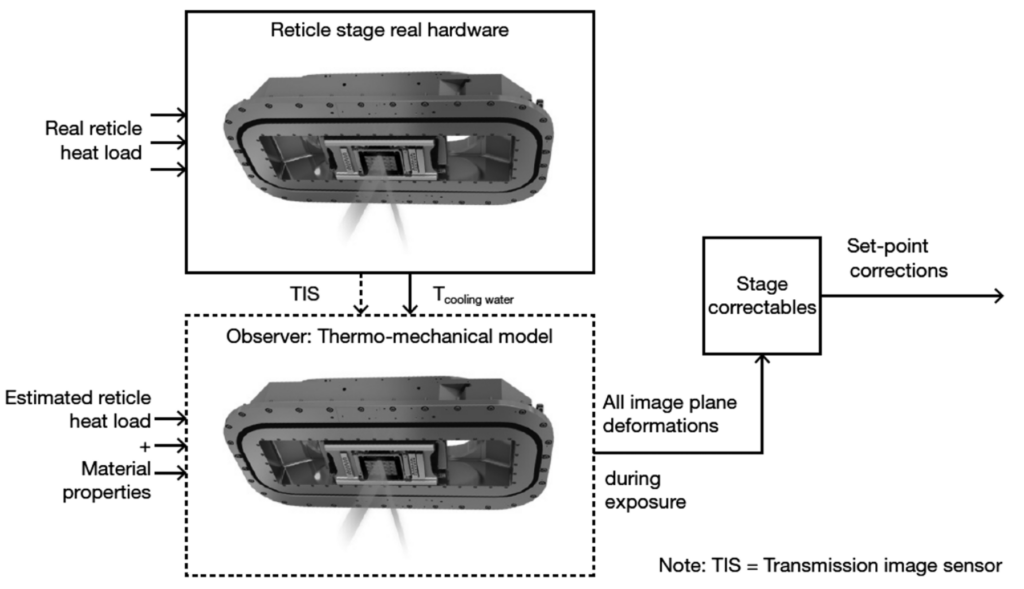
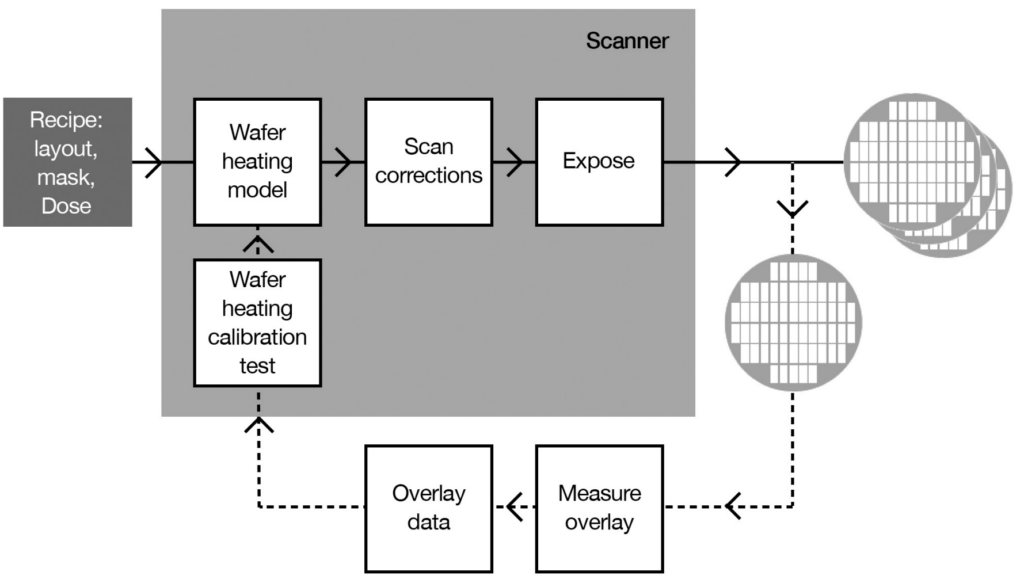
또한 마스크 가열에 따른 스테이지 포지션 보정 방법론도 있습니다. 또한 웨이퍼 가열에도 유사한 방법을 적용할 수 있다고 합니다. 다들 아시겠지만 웨이퍼와 웨이퍼 클램프 온도는 EUV와 적외선의 흡수로 인해 크게 상승합니다. 적외선은 EUV 소스에서 EUV 광이 생성되는 방식에서 비롯됩니다. 웨이퍼 가열은 클램프와 웨이퍼 모두의 열-기계적 변형을 유발합니다. 시스템의 설계는 웨이퍼와 클램프 온도를 최대한 안정적으로 유지하도록 되어 있지만, 결과적으로 발생하는 변형은 오버레이 예산에서 허용하는 것보다 더 큽니다. 따라서 보정 모델로 환경보상을 합니다.
클램프와 오염
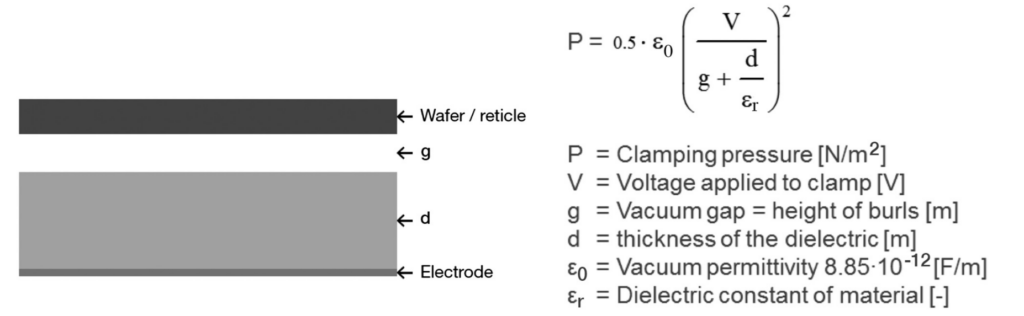
EUV 시스템에서의 마스크 장착은 마스크와 웨이퍼를 고정하기 위해 전기적 힘이 필요하다는 점입니다. 즉, 상술하였듯 마스크와 웨이퍼 스테이지에는 정전기 클램프가 장착되어 있습니다. 마스크와 전극 사이에는 유전체 층이 있습니다. 클램프 힘은 인가 전압, 유전 특성 및 마스크/웨이퍼와 전극 사이의 거리에 따라 달라집니다 웨이퍼와 마스크는 모두 표면 전체에 클램핑되므로 오염을 방지하기 위해 특별한 주의를 기울여야 하며, 뒷면의 입자가 웨이퍼 또는 마스크 변형을 일으키니 주의해야하죠.
강조해도 부족한 오염... 마스크 취급 시 청결은 매우 중요합니다. 뒷면의 입자는 마스크 변형을 유발하여 오버레이 및 초점 오류를 일으킬 수 있습니다. 전면의 입자는 이미징되어 수율에 직접적인 영향을 미칠 수 있습니다. 최근 개발로 인해 전면 오염 위험을 효과적으로 제거할 수 있는 EUV 펠리클이 도입되었습니다. 해상도가 더 높은 미래 시스템의 경우 펠리클이 필수적인 것이겠죠? 설비도 가뜩이나 비싸도 5000번대 들어오면 무지막지할텐데, 들리는 소문으로는 EUV 마스크 억단위 그냥 넘는다는데, 이거 못쓰게되면 기업에서 마음이 아프겠죠?.
여튼 다시 돌아와서 마스크 뒷면이 높이가 큰 입자(3mm 이상)로 오염되면 오버레이에 영향을 미칠 수 있지만, 스캐너 마스크 척 설계의 특성을 고려할 때, 특히 발견되는 대부분의 오염은 유기물이고 마스크가 고정될 때 압축되기 때문에 성능에 영향을 주지 않고 수십 개의 애더를 견딜 수 있긴합니다.
EUV 펠리클과 오염
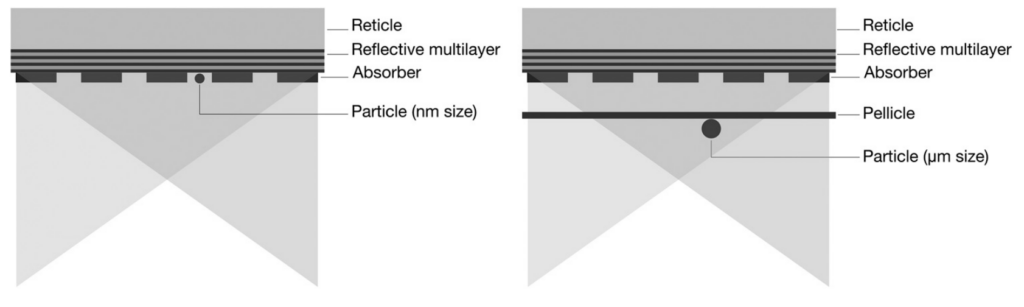
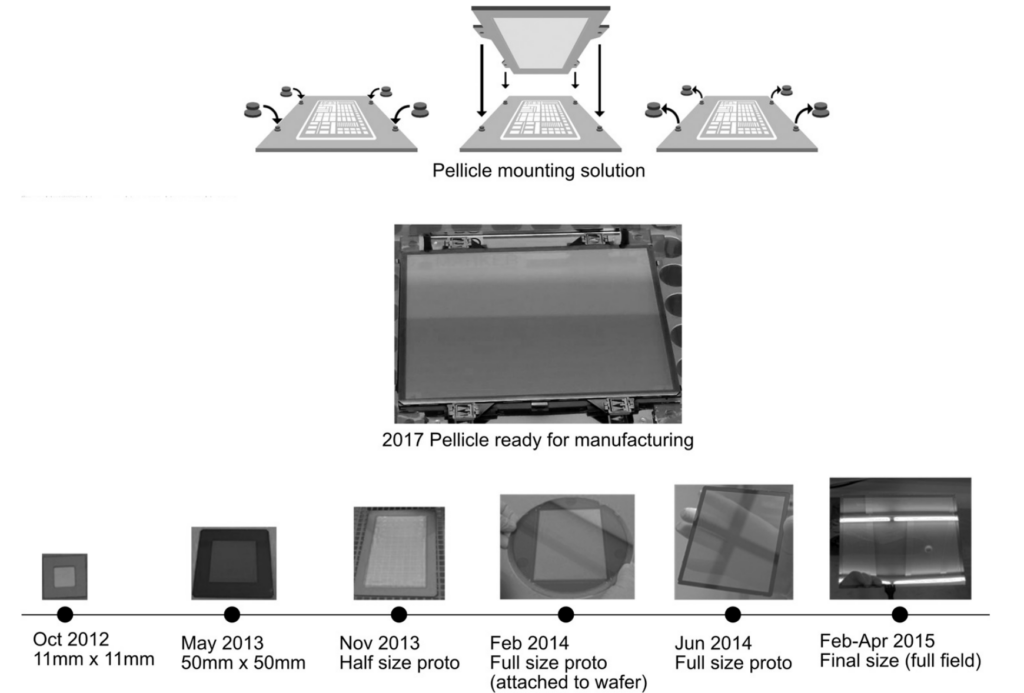
펠리클은 입자가 마스크 전면에 착지하는 것을 방지하는 얇은 막입니다. 멤브레인 위의 입자는 초점면을 벗어나기 때문에 이미징되지 않지만, 마스크 위의 입자는 웨이퍼에 선명한 이미지를 갖게 되므로 결함으로 이어질 수 있습니다. DUV 리소그래피에 사용되는 기존 유기 박막 기술은 투과율이 낮기 때문에 EUVL에 적용할 수 없습니다. EUV 마스크는 반사형이기 때문에 빛이 멤브레인을 두 번 통과해야 하는데, 첫 번째는 일루미네이터에서 나온 EUV 빛이 멤브레인을 통과할 때이고, 두 번째는 마스크에서 POB를 향해 반사되는 EUV 빛이 멤브레인을 통과할 때입니다.
EUV 펠리클에 허용 가능한 투과율을 얻으려면 매우 얇은 고체 재료로 만들어야 합니다. 일반적인 두께가 약 50nm 이하인 경우 10%의 단일 투과율이 가능합니다. 멤브레인 필름은 들어오는 빛과 반사되는 빛의 일부를 흡수합니다. 이렇게 하면 펠리클의 온도가 상승하여 수명이 단축되고 펠리클에 닿는 최대 허용 소스파워가 감소할 수 있습니다. 현재도 더 높은 파워를 지원하기 위한 개발이 진행 중입니다. (PS: ASML은 미쯔이를 사랑해? 흐흐...)
1986년 최초의 EUV 노광이 수행된 이후 EUV 리소그래피는 매우 먼 길을 걸어왔습니다. 이제 NA를 0.55, 심지어 그 이상까지 확장할 수 있는 EUV는 앞으로 수년에서 수십년 동안 리소그래피의 주역이 될 가능성이 높습니다. 무어의 법칙을 더욱 확장할 수 있는 길을 모색하기 위해 현재 많은 연구 작업이 진행 중이지만, 아직 할일이 많습니다. 읽어주셔서 감사합니다.
'Semiconductor > EUV lithography' 카테고리의 다른 글
| 38. EUV 파장은 왜 13.5 nm 인가요? (0) | 2023.11.04 |
|---|---|
| 37. EUV 이미징의 이점 (0) | 2023.11.03 |
| 35. EUV Scanner에 대하여 (2) (1) | 2023.11.01 |
| 34. EUV Scanner에 대하여 (1) (2) | 2023.10.31 |
| 33. EUV Mask에 대하여 - 종류 (5) (1) | 2023.10.30 |



